Just sharing ~100 slides about PyTorch 2 internals focusing on recent innovations (Dynamo, Inductor, and ExecuTorch). I had a lot of fun preparing this and hope you’ll enjoy it. I’m planning to record it soon.
Different gaussian curvature surfaces. Image by Nicoguaro.
We are so used to Euclidean geometry that we often forget the importance of curved geometries and how to measure things that don’t live on orthonormal bases. Just like we cannot understand physics and spacetime curvature without Riemannian geometry, I don’t think we will ever get a deep understanding of Machine Learning (ML) or data without it. There are a lot of recent works that are more and more embedding (an overloaded term for this article) differential geometry into ML, but it is unfortunate that the term “geometric deep learning” ended up being a term that most people attach most of the time only to graphs. There is, however, a lot more than graphs in using modern geometry in ML.
I was reading the excellent article from Sander Dieleman about different perspectives on diffusion, so I thought it would be cool to try to contribute a bit with a new perspective.
A tale of two scores
Fisher information, metric and score
R.A. Fisher at his calculator in 1958 (courtesy of the Fisher Memorial Trust).
There are two important quantities that are widely known today and that keep popping out basically everywhere. The first one is the fisher information matrix \( \mathbf{F}\) (or FIM):
$$\mathbf{F}_\theta = \mathop{\mathbb{E}} \left[ \nabla_\theta \log p_\theta(y \vert x) \, \nabla_\theta \log p_\theta(y \vert x)^T \right] \,$$ with \(y \sim p_\theta (y \vert x)\) and \(x \sim p_{\text{data}}\). Note that where \(y\) comes from is very important and often a source of confusion. \(y\) is from the model’s predictive distribution (and this is quite interesting because it means you don’t need labels to estimate \( \mathbf{F}\) as well). The FIM is used in many places, such as Cramér-Rao bound, continual learning, posterior approximation, optimization, bayesian prior, KL divergence curvature, etc. Note that there is a lot of debate about the FIM vs empirical FIM and their different properties that I will skip going over here (I discussed this in the optimization context in this presentation if you are interested).
Dr. C.R. Rao, during the Indian Statistical Institute (ISI) days.
The fisher information matrix is also used in information geometry as a Riemannian metric where it is called Fisher-Rao metric (there are other names for it as well, which can be quite confusing). In this statistical manifold, where coordinates are parametrizing probability distributions, the metric (which equips the manifold) induces a inner product and allows us to compute norms and distances for distributions. Information geometry was pioneered by the late C. R. Rao and further developed and popularized by Shun-ichi Amari (who wrote some fine books about it).
We will talk more about the statistical manifold and what the metric actually does more intuitively later, but for now, note that the FIM uses the score, or what we can call, the Fisher score:
This score is the gradient of the log-likelihood w.r.t. its parameters \(\theta\), so it is telling us the steepness of the likelihood, with the FIM meaning the variance of this score. The FIM is also equivalent to the negative expectation of the Hessian matrix, which points its significance as a curvature at a parameter point, hence its appearance as a metric tensor as well (to be precise, as a metric tensor field).
The other score, as in score-based models (aka Stein score)
Now, there is another score, which is the one used in score-based models and score matching, which is often called Stein score:
Note that even though it looks similar and has a similar name to the previous score we showed, this is a very different score function. It doesn’t give you the gradients for distribution’s parameters but gradients w.r.t. data. It has been shown that we can estimate this score function from data even in absence of ground truths to this quantity. Yang Song has a nice article explaining motivation and recent developments.
The main point is that once you have this score function, you have a very powerful gradient field that tells you how samples should move in data space. You can then sample from the data distribution using Langevin sampling, which is basically SGD with noise to avoid collapse to a minima.
The missing metric
If the Fisher score gives the building block to the metric tensor for the statistical manifold, which metric can we build with this (Stein) score and which manifold does it belongs to ? It is surprising that we still don’t seem to have a clear formalization for this yet, at least I wasn’t able to find much about it. You can find some works about diffusion models on Riemannian manifolds but not about using the estimated (through modern deep learning models) score to build a Riemannian metric.
There is a nice quote from the physicist John Wheeler about Einstein’s relativity:
Space-time tells matter how to move and matter tells space-time how to curve.
– John Wheeler
It is very interesting that we can build a metric using this estimated score function, with the same mathematical framework used in the theory of relativity, where the quote can be modified to our case as:
Diffusion models tells data how to move and data tells Diffusion models how to curve.
I will start to explore the topic with some examples in a series of posts, but here is a glimpse of a geodesic using the stein score as metric tensor where a Gaussian is curving the data manifold and creating this structure where the shortest distance from two points is not a straight line anymore:
This is a very interesting connection, seeing diffusion and score-based models as a metric tensor field can give us very interesting tools to explore data distances, geodesics, norms, etc, from the data manifold itself. We are still in the statistical domain, but the manifold is not the statistical manifold anymore where Riemannian coordinates parametrize distributions, it is a manifold where coordinates are the samples themselves. I think this connection of the score with the metric tensor field is a unexplored domain that is definitely very fertile, it can give us a much deeper understanding not only of data but also about our sampling algorithms.
The inner product induced by the score metric is the following:
Note that we are using the (Stein) score as building block for our metric tensor \(g_x\), and this score is replaced by the estimated one parametrized by a deep neural network, so notation can become a nightmare because the base point where the metric tensor is evaluated is already used as lower index, so it can become \(g^{\theta}_x\) to denote that this metric tensor is parametrized by \(\theta\) (to make things worse, in diff geometry, indices positions also has an important meaning).
Hope you like the idea and please provide feedback and keep an eye in the next posts of this series.
Updates
27 Sept 2023: added more details about the metric tensor definition using the (Stein) score.
Erik Desmazieres’s “La Bibliothèque de Babel”. 1997.
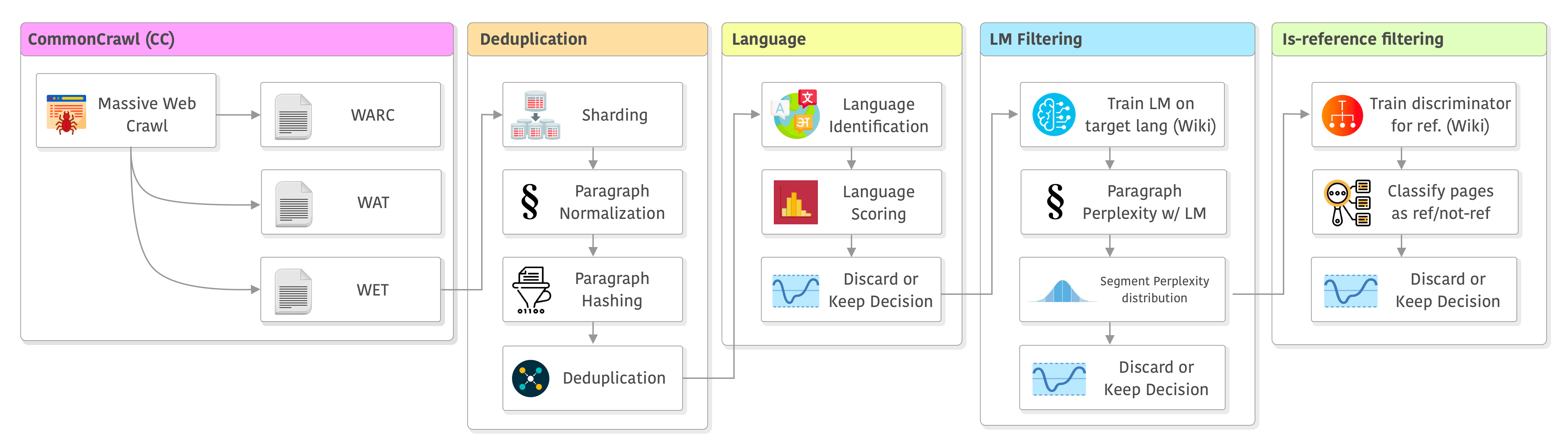
We have been training language models (LMs) for years, but finding valuable resources about the data pipelines commonly used to build the datasets for training these models is paradoxically challenging. It may be because we often take it for granted that these datasets exist (or at least existed? As replicating them is becoming increasingly difficult). However, one must consider the numerous decisions involved in creating such pipelines, as it can significantly impact the final model’s quality, as seen recently in the struggle of models aiming to replicate LLaMA (LLaMA: Open and Efficient Foundation Language Models). It might be tempting to think that now, with large models that can scale well, data is becoming more critical than modeling, since model architectures are not radically changing much. However, data has always been critical.
The entire pipeline of CCNet (plus some minor modifications made by LLaMA’s paper) can be seen below. It has the following stages: data source, deduplication, language, filtering, and the “is-reference” filtering which was added in LLaMA. I will go through each one of them in the sections below.
Visual overview of the CCNet pipeline with some modifications done in LLaMA. Click to enlarge.
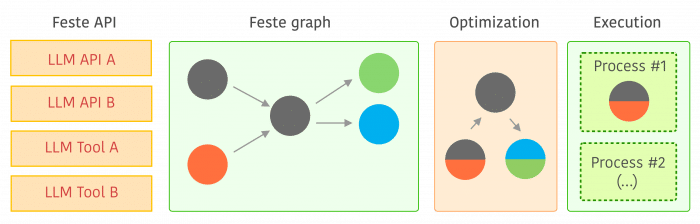
I just released Feste, a free and open-source framework with a permissive license that allows scalable composition of NLP tasks using a graph execution model that is optimized and executed by specialized schedulers. The main idea behind Feste is that it builds a graph of execution instead of executing tasks immediately, this graph allows Feste to optimize and parallelize it. One main example of optimization is when we have multiple calls to the same backend (e.g. same API), Feste automatically fuses these calls into a single one and therefore it batches the call to reduce latency and improve backend inference leverage of GPU vectorization. Feste also executes tasks that can be done in parallel in different processes, so the user doesn’t have to care about parallelization, especially when there are multiple frameworks using different concurrency strategies.
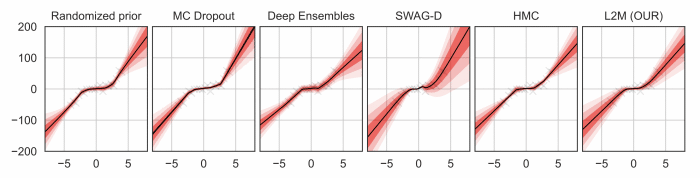
Uncertainty quantification for deep neural networks has recently evolved through many techniques. In this work, we revisit Laplace approximation, a classical approach for posterior approximation that is computationally attractive. However, instead of computing the curvature matrix, we show that, under some regularity conditions, the Laplace approximation can be easily constructed using the gradient second moment. This quantity is already estimated by many exponential moving average variants of Adagrad such as Adam and RMSprop, but is traditionally discarded after training. We show that our method (L2M) does not require changes in models or optimization, can be implemented in a few lines of code to yield reasonable results, and it does not require any extra computational steps besides what is already being computed by optimizers, without introducing any new hyperparameter. We hope our method can open new research directions on using quantities already computed by optimizers for uncertainty estimation in deep neural networks.
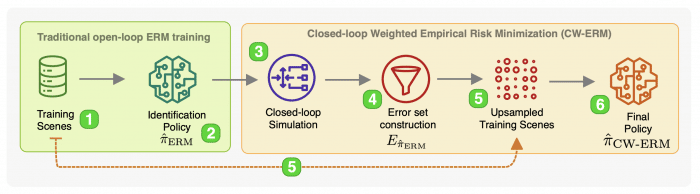
The imitation learning of self-driving vehicle policies through behavioral cloning is often carried out in an open-loop fashion, ignoring the effect of actions to future states. Training such policies purely with Empirical Risk Minimization (ERM) can be detrimental to real-world performance, as it biases policy networks towards matching only open-loop behavior, showing poor results when evaluated in closed-loop. In this work, we develop an efficient and simple-to-implement principle called Closed-loop Weighted Empirical Risk Minimization (CW-ERM), in which a closed-loop evaluation procedure is first used to identify training data samples that are important for practical driving performance and then we these samples to help debias the policy network. We evaluate CW-ERM in a challenging urban driving dataset and show that this procedure yields a significant reduction in collisions as well as other non-differentiable closed-loop metrics.
SafePathNet: Safe Real-World Autonomous Driving by Learning to Predict and Plan with a Mixture of Experts
The goal of autonomous vehicles is to navigate public roads safely and comfortably. To enforce safety, traditional planning approaches rely on handcrafted rules to generate trajectories. Machine learning-based systems, on the other hand, scale with data and are able to learn more complex behaviors. However, they often ignore that agents and self-driving vehicle trajectory distributions can be leveraged to improve safety. In this paper, we propose modeling a distribution over multiple future trajectories for both the self-driving vehicle and other road agents, using a unified neural network architecture for prediction and planning. During inference, we select the planning trajectory that minimizes a cost taking into account safety and the predicted probabilities. Our approach does not depend on any rule-based planners for trajectory generation or optimization, improves with more training data and is simple to implement. We extensively evaluate our method through a realistic simulator and show that the predicted trajectory distribution corresponds to different driving profiles. We also successfully deploy it on a self-driving vehicle on urban public roads, confirming that it drives safely without compromising comfort.
In 2009 I started playing with LLVM for some projects (data structure jit, for genetic programming, jit for tensorflow graphs, etc), and in these projects I realized how powerful LLVM design was at the time (and still is): using an elegant IR (intermediate representation) with an user-facing API and modularized front-ends and backends with plenty of transformation and optimization passes. Nowadays, LLVM is the main engine behind many compilers and JIT compilation and where most of the modern developments in compilers is happening.
On a related note, PyTorch is doing an amazing job of exposing more of the torch tracing system and its IR and graphs, not to mention their work on recent fusers and TorchDynamo. In this context, I was doing a small test to re-implement Shine, but using ATen ops for tensors and realized that there were not many educative tutorials on how to use LLVM to JIT PyTorch graphs, so this is a quick series (if time helps there will be more following posts) on how to use LLVM (python bindings) to go from PyTorch graphs (as traced by torch.fx) to LLVM IR and native code.
Detour – PyTorch NNC (Neural Net Compiler)
PyTorch itself also has a compiler that uses LLVM to generate native code for subgraphs that the fuser identifies. This is also called NNC (Neural Net Compiler) or Tensor Expressions (TE) as well, you can read more about them here in the C++ API tutorial. One thing to note though is that default binaries you get from PyTorch do not come linked to the LLVM libraries, so you need to compile it by yourself and enable LLVM backend, otherwise it won’t use LLVM to do the JIT compilation/optimization of the subgraphs. Let’s take a look at it first before starting our tutorial
I was recently interested in the intersection of Machine Learning and RF and I was taking a look into LoRa modulation, which is based on Chirp Spread Spectrum (CSS), and ended up getting to know more about the Helium network. I still think that the most stupid piece of technology behind crypto mining is spending GPU/CPU/ASIC cycles to do proof-of-work (PoW), but in the Helium network, they did something quite interesting, which was to switch to something useful such as the proof-of-coverage instead of generating heat and burning energy. Therefore we can say that the miners are doing something useful by providing radio coverage, instead of purely generating heat.
I’m proud to announce Episuite, an open-source project with a suite of tools and components for epidemiology in Python. It is an initiative trying to fill the gap that we have in the Python ecosystem for epidemiology frameworks.
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish. Cookie settingsACCEPT
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may have an effect on your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.